
20.07.2023 13:24
Робототехніка: Нові датчики, схожі на шкіру, підходять майже всюди
Дослідники з Мюнхенського інституту робототехніки і машинного інтелекту (MIRMI) при Технічному університеті Мюнхена (TUM) розробили автоматичний процес виготовлення м’яких сенсорів. Ці універсальні вимірювальні елементи можна прикріпити практично до будь-якого об’єкта. Застосування передбачається, зокрема, в робототехніці та протезуванні.
” Дослідження та відчуття нашого оточення є важливим для розуміння того, як ефективно з ним взаємодіяти”, – каже Соня Ґросс.
Важливим фактором для взаємодії з об’єктами є їхня форма.
“Це визначає, як ми можемо виконувати певні завдання”, – каже дослідниця з Мюнхенського інституту робототехніки та машинного інтелекту (MIRMI) при Технічному університеті Мюнхена.
Крім того, фізичні властивості об’єктів, такі як їхня твердість і гнучкість, впливають на те, як ми можемо, наприклад, хапати їх і маніпулювати ними.
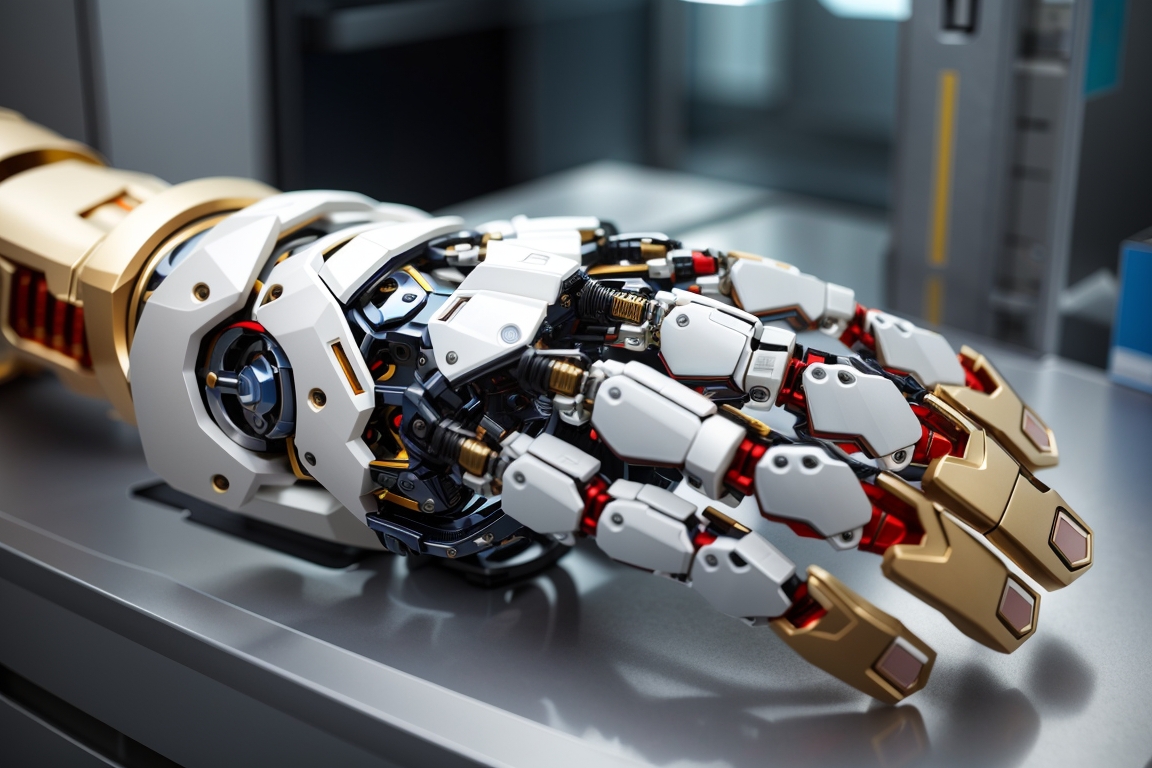
Штучна рука: взаємодія з роботизованою системою
Святим Граалем у робототехніці та протезуванні є реалістична емуляція сенсомоторних навичок людини, таких як у людській руці. У робототехніці датчики сили і крутного моменту повністю інтегровані в більшість пристроїв. Ці вимірювальні датчики забезпечують цінний зворотний зв’язок про взаємодію роботизованої системи, наприклад, штучної руки, з навколишнім середовищем. Однак традиційні датчики обмежені з точки зору можливостей кастомізації. Вони також не можуть бути прикріплені до довільних об’єктів. Коротше кажучи, до цього часу не існувало процесу виробництва сенсорів для жорстких об’єктів довільних форм і розмірів.
Вперше представлено нову структуру для м’яких сенсорів
Це стало відправною точкою для досліджень Соні Гросс і Дієго Ідальго, які вони представили на конференції з робототехніки ICRA в Лондоні. Відмінність: м’який, схожий на шкіру матеріал, який обертається навколо об’єктів. Дослідницька група також розробила фреймворк, який значною мірою автоматизує процес виробництва цієї шкіри. Це працює наступним чином:
“Ми використовуємо програмне забезпечення для побудови структури сенсорних систем, – розповідає Ідальго. “Потім ми відправляємо цю інформацію на 3D-принтер, де виготовляються наші м’які сенсори”.
Принтер впорскує струмопровідну чорну пасту в рідкий силікон. Силікон твердне, але паста залишається в ньому і залишається рідкою. Коли датчики стискаються або розтягуються, їхній електричний опір змінюється.
“Це говорить нам про те, яка сила стискання або розтягування прикладена до поверхні. Ми використовуємо цей принцип, щоб отримати загальне розуміння взаємодії з об’єктами і, зокрема, навчитися керувати штучною рукою, яка взаємодіє з цими об’єктами”, – пояснює Ідальго.
Що відрізняє їхню роботу: сенсори, вбудовані в кремній, підлаштовуються під відповідну поверхню (наприклад, пальці або кисті рук), але при цьому надають точні дані, які можуть бути використані для взаємодії з навколишнім середовищем.
Нові перспективи для робототехніки та особливо протезування
“Інтеграція цих м’яких, схожих на шкіру сенсорів у 3D-об’єкти відкриває нові шляхи для вдосконаленого тактильного сприйняття в штучному інтелекті”, – говорить виконавчий директор MIRMI професор Самі Хаддадін.
Датчики надають цінні дані про стискаючі сили та деформації в режимі реального часу – таким чином забезпечуючи негайний зворотній зв’язок. Це розширює діапазон сприйняття об’єкта або роботизованої руки – сприяючи більш складній і чутливій взаємодії.
Хаддадін: “Ця робота має потенціал здійснити загальну революцію в таких галузях, як робототехніка, протезування та взаємодія між людиною і машиною, уможливлюючи створення бездротової сенсорної технології, що налаштовується, для довільних об’єктів і машин”.
)
)
)
)
)
)
)
)
